Онлайн калькулятор пропеллеров eCalc известный по таким запросам как: propeller calculator, rc calculator, rc калькулятор - эффективное средство для расчета подбора двигателя с пропеллером для авиа модели. Этот калькулятор позволит Вам не только сохранить жизнь своему двигателю, но и увеличить срок эксплуатации, так же экономить ресурс батареи благодаря возможности выбрать оптимальные параметры для крейсерского режима (оптимальный режим).
Калькулятор только онлайн и расположен по этому адресу ECALC.CH . На главной странице (на английском) предлагается выбор (калькулятора) по типу модели и выбор языка:
- propCalc - калькулятор для пропеллеров самолета
- xcopterCalc - калькулятор для коптеров
- fanCalc - калькулятор импеллерных систем
- heliCalc - калькулятор для вертолетов
С годами ECALC урезал функционал для бесплатных пользователей, поэтому ниже скрины как обойти ограничения ECALC.CH плюс в довесок еще одна ссылка: http://rc-calc.com/ru/copter
Для тех кто понимает в html без слов понятно, описание для тех кто в первый раз. Видим, что AX-4008Q неактивен.
Нажимаем в браузере F12 (например в хроме или firefox) попадаем в "инспектора". Нажимаем на стрелку (на скрине отмечена цифрой 1), затем нажимаем на окно выбора (чего либо, пример с двигателем) по номером два на скрине и видим, что выделилась строка (под цифрой 3).
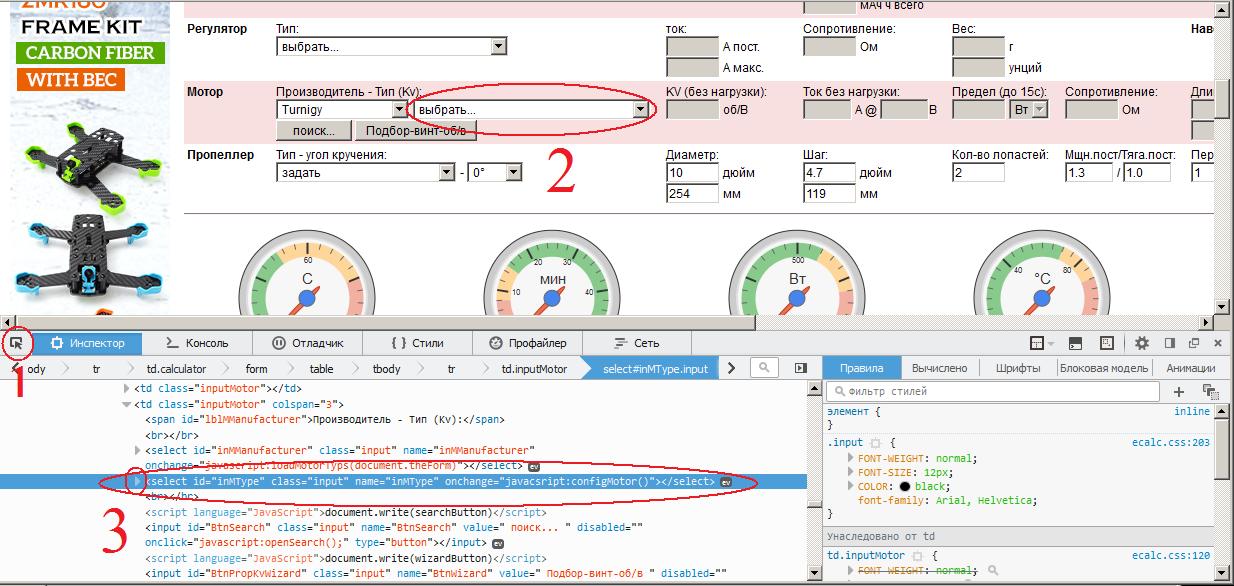
Нажимаем на эту строку, слева значек - развернуть. Видим в списке нужный двигатель видим, что стоит признак disable. Переделываем аналогично другим строкам, которые работают.

Пример исправленной строки.

С годами ECALC урезал функционал для бесплатных пользователей, поэтому в довесок еще одна ссылка: http://rc-calc.com/ru/copter
При создании коптера одним из важнейших параметров является время автономного полёта. Если вы хотите, что бы ваш коптер летал как можно дольше, моторы и их несущие винты должны работать в оптимальном режиме с максимальным КПД. Для решения данной задачи нами был спроектирован специальный измерительный стенд, речь о котором и пойдет в данной статье.
Мы занимаемся созданием бесколлекторных моторов и недавно у нас был заказ на мотор для квадрокоптера с тягой не менее 2 Кг на каждый винт. До этого мы не делали моторы под воздушный винт и нам был необходим метод измерения и стенд для мотора с винтом.
Прежде чем начать выбирать оптимальный мотор и винт под него, сперва нужно разобраться какие потери возникают в моторах.
Основными источниками потерь в бесколлекторных моторах являются железо статора и его обмотка.
Потери на железе возникают из-за его перемагничивания. Данные потери условно можно считать пропорциональными оборотам мотора и они задают минимальную потребляемую энергию мотора. Так, например, если вы возьмете большой и мощный мотор для маленького коптера с маленьким винтом, то ничего хорошего у вас не получится. Мотор просто будет вращаться вхолостую с нулевым КПД и греть железо в статоре.
Потери в медной проволоке наоборот не зависят от оборотов, а зависят от тока/потребляемой мощности. Данные потери ограничивают максимальную мощность, которую способен выдать мотор не перегревшись.
Вторым важным элементом при выборе мотора является винт. Малые винты обладают более низкими показателями эффективности г/Вт(1 грамм подъёмной силы/1 Ватт потребляемой мощности), но маленькие винты более динамичны и позволяют быстро набрать скорость на гоночных коптерах. Для достижения максимального времени полёта винт должен соответствовать максимально эффективному режиму работы мотора.
Однако если мы захотим подобрать оптимальные комплектующие для своего коптера, то мы столкнемся с большой проблемой при их выборе. Производители дают минимальный набор характеристик для своего товара. По винтам вообще невозможно найти какой либо информации кроме их размера.
Функционал стенда
На данный момент несколько производителей уже представили на рынок свои стенды. Однако их возможности не сильно превосходит функционал кухонных весов. И данные стенды не способны дать всех характеристик при работе мотора.
Нам же от стенда были необходимы следующие параметры: потребляемая мощность, обороты мотора, тяга винта, момент создаваемый винтом, КПД мотора, эффективность мотора, винта.
Исходя из этих параметров мы спроектировали конструкцию стенда и снабдили его всеми необходимыми датчиками.

Для измерения силы тяги и момента были выбраны хорошо распространённые сейчас датчики с тензосопротивлением. Они обладают хорошей жесткостью и высокой точностью измерения и очень удачно подходят по своей конструкции.
Для измерения остальных параметров были выбраны стандартные для этого датчики: полупроводниковое термосопротивление для температуры, акселерометр для замера вибраций, датчик тока на эффекте холла для измерения тока и делитель для напряжения…
Сердцем нашего стенда является микроконтроллер ATMega328 на плате Arduino Nano. Он собирает показания с датчиков, обрабатывает их и выводит на экран. Данный микроконтроллер оптимально подходит для данной задачи. Он обладает минимальной ценой, не привередлив к питанию, стабилен и имеет достаточное количество интерфейсов для данной задачи.
В результате нашей работы был получен стенд со следующими параметрами:
- Питание через BEC модулю контроллера 5-9В, либо через micro USB
- Измерение тяги до 5Кг с точностью +-5г
- Измерение момента до 3Кг/см с точностью +-5г/см
- Измерение напряжения до 30В с точность +-0.2В
- Измерение тока до 30А с точностью +-0.1А
- Измерение КПД с точностью +-2.5%
- Возможность измерения оборотов винта в диапазоне 1000-15000RPM
- Возможность измерения относительных вибраций.(Можно использовать этот параметр для балансировки мотора с винтом путём уменьшения параметра вибраций)
- Измерение температуры мотора (*на данный момент не полностью реализовано в стенде, нами использовался отдельно подключенный датчик)
- Возможность управления педалью “газа” прямо с пульта
Мы испытали наш стенд на распространенном китайском моторе 2212 и на нашем моторе.

Пример испытания на видео
Китайский мотор во всём диапазоне не смог выдать КПД выше 50%, а его эффективность составила около 4-5г/Ватт. Наш же смог показать КПД выше 70%, при этом он работал на минимуме своей мощности(тест был в пике до 500Вт, теоретический максимум 1500Вт), т.к. размер тестируемого винта маловат для него и с большем винтом КПД только возрастёт. Эффективность же у нас получилась 9г/Ватт. Так что даже с учетом гораздо большего веса мотора, даже небольшой коптер с нашим мотором смог бы летать дольше.)
Экономный вариант
Стенд описанный в данной статье является достаточно сложным и предназначен для точной проработки силовых агрегатов дрона. Для случая, когда охото сэкономить и узнать просто тягу мотора, нами был сделан простой, дешевый адаптер способный выполнить данную функцию.

Данный адаптер крепится одним концом к мотору, вторым к бутылке с водой. Бутылка устанавливается на весы. Далее мотор запускается и тяга измеряется по показаниям весов.

Крепление на адаптере сделано универсальным и подходит практически под все распространенные моторы. На втором конце адаптера находится резьба для накручивания на 5ти литровую бутылку.
Доброго времени суток, дорогой читатель. Сегодня мы поговорим о том, что поднимет твой летательный аппарат на новые высоты… ну или хоть на какие-то. Речь пойдёт об электромоторах. Я расскажу тебе о том, как выбрать двигатель для квадрокоптера твоей мечты, и о многих других нюансах, связанных с этой темой. Поехали!
Первым, с чем ты столкнёшься при выборе будут эти два термина. Это две разных реализации двигателей. Главное отличие – расположение обмотки.
Спонтанный ликбез:
Статор – неподвижная (статичная) часть движка.
Ротор – вращающаяся (rotation) часть.
Коллекторные
Обладает щеточно-коллекторным узлом. Коллектор, это набор контактов (обмоток), расположенных на роторе, и щётка – скользящий контакт, расположенный на статоре. Как раз наличие этой щётки и убавляет ресурс коллекторного мотора, ибо создаёт трение. Двигатель начинает вращаться при подаче на него постоянного тока, а направление вращения зависит от полярности оного. Плавно разгоняются и замедляются.

Преимущества
- Маленький вес и размер
- Низкая стоимость
- Прост в ремонте
Недостатки
- Низкий КПД
- Низкая скорость вращения
- Перегрев
- Быстрый износ
Бесколлекторные (бесщёточного типа)
Состоит из ротора с постоянными магнитами и статора, с обмотками. Изменение направления вращения осуществляется изменением полярности (Нужно поменять два провода из трёх). Разгон и замедление происходят очень быстро (рывком). Имеют разное количество полюсов. Чем их больше, тем медленнее, но с большим усилием, вращается ротор.

Преимущества
- Высокая скорость вращения
- Износостойкость
- Защищённость от внешних воздействий
Недостатки
- Стоимость
- Сложный ремонт
Тут есть нюанс. Устройство двигателя бесколлекторного типа может отличаться.
- Inrunner – Стандарт. Ротор с постоянными магнитами вращается в статоре с обмотками.
- Outrunner – Нестандарт. Здесь ротором выступает корпус, который вращается вокруг статора с обмотками.
Характеристики двигателя

Мощность (потребляемая)
Измеряется в ваттах. Чем больше мощность, тем быстрее кончится батарея. Тут всё просто
Вес
Чем больше вес, тем мощнее и медленнее (обычно). Важно помнить, что вес самого движка нужно учитывать при расчёте веса, который он должен поднять.
Энергоэффективность (КПД)
Комплексное понятие, которое зависит ещё и от батареи, контроллера, пропеллера, и даже проводов. Тут подробно останавливаться не буду- чем выше, тем лучше. Двигатель с КПД 70% тратит 70% потреблённой энергии на полёт, а 30% на обогрев окружающей среды и приближение тепловой смерти вселенной. Для бесколлекторных нормой является 90%, а для коллекторных 70%.
Температура нагрева в работе
Как ты уже понял- напрямую зависит от КПД. Чем больше греется, тем больше тратит энергии впустую.
Балансировка и уровень вибрации
По сути, это качество исполнения. Есть такая вещь как допуск. Этот те пределы, в которых отклонение от идеала не считается проблемой. Чем выше точность изготовления, тем более соосной будет система, и тем меньше будет вибраций. Иногда лучше не брать самое дешёвое.
Вибрация в двигателе ускоряет его износ, износ прочих деталей, раскручивает винтики и шумит. Неприятное явление.
Тяга
Тяга, она же подъёмная сила. Это тот вес, который может поднять двигатель (включая самого себя). Но это не значит, что для двухкилограммового квадрокоптера нужно четыре двигателя. Нужен запас тяги, нужно учесть помехи, и банальную не идеальность моторов.
Формула будет примерно следующей.
Тяга одного мотора = (вес коптера * 2)/ кол-во движков
В итоге, для квадрокоптера весом 1 кг нужно 4 двигателя с тягой 500 грамм.
KV
Это достаточно сложный параметр – обороты на вольт без нагрузки. То есть если мы имеем моторчик в 1000 kv, то при подключении его к источнику тока с напряжением 12 вольт, он выдаст 12 000 оборотов в минуту (KV*U). Однако, это всё крайне теоретически.

На практике есть нагрузка, и создаваемое им сопротивление воздуха. Из этого следует, что обороты будут ниже, или их не будет вообще, так как от КВ зависит крутящий момент. Чем выше параметр КВ, тем меньшее усилие развивает электродвигатель.
Для понимания процесса (грубый пример).
Так как электродвигатель работает из-за перемены полярности электромагнитов с определённой частотой, то кв, по сути, характеризует частоту, с которой изменяется полярность магнитов, к которым притягивается постоянный магнит. для простоты примем, что постоянный магнит на роторе. Если всё идёт по плану, то ротор проходит путь от одного переменного магнита до другого, после полярность меняется, и он идёт дальше.
Если слишком часто менять полярность, или увеличивать нагрузку, то ротор просто не успеет разогнаться и преодолеть нужный путь, и его начнёт притягивать обратно, или же он вообще не сдвинется с места. Это похоже на пробуксовку колеса авто на льду. Чем выше скорость вращения и вес авто, тем больше оно будет проскальзывать, и меньшее усилие развивать.
В итоге, никто не знает сколько нужно, ибо параметр не поддаётся простому определению. Можно просто ориентироваться на следующие цифры. Лёгкий гоночный коптер с маленькими пропеллерами имеет KV 2100—2500, а для тяжёлых, многокилограммовых аппаратов нужно брать что-то в районе 200-900 KV.
Как правильно выбрать

Есть несколько основных параметров, исходя из которых придётся выбирать. О них ниже. Прежде всего, советую перейти на сайт калькулятора Ecalc, и ознакомиться с калькулятором. Он позволит как подобрать примерную комплектацию коптера, так и рассчитать полётных характеристики уже готовой сборки. Расчёт моторов стоит начать именно с него.
Общий вес и необходимая тяга
Это пункт планировки, и возможно важнейшие характеристики. Нужно чётко понимать – сколько будет весить квадрокоптер. В общий вес идёт всё, включая пропеллеры, провода и полезную нагрузку. Исходя из формулы расчёта тяги, для достижения хороших полётных характеристик, двигатели твоего коптера должны поднимать его вес, помноженный на два.
Размер рамы и пропеллера
От размера и конфигурации рамы зависит то, сколько двигателей тебе придётся поставить, и на сколько большую диагональ пропеллеров ты сможешь использовать. Сейчас не буду вдаваться в подробности конфигурации, и рассказывать о том, как правильно подобрать раму. Просто напомню, что это ответственный узел, и на нём будет держаться всё, в том числе и тяжёлые, вибрирующие двигатели.

Запомни три простых правила.
- Тут важно не промахнуться с размером. Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймов
- Жёсткость рамы и её вес очень важны. Если есть возможность, то бери с запасом по прочности. Очень хорошо тебя показывают композитные материалы (карбоновая рама – предел мечтаний)
- Резьбы в пластике или вообще не могут считаться за резьбы, или являются одноразовыми. Ищи или металлические вставки, или думай, как ещё зафиксировать болты
От размера лопастей зависит поведение дрона в воздухе. Большая диагональ даст большую подъёмную силу и устойчивость, в ущерб маневренности, и наоборот. Здесь надо отталкиваться от своей цели. Так же нужно учитывать то, что пропеллер создаёт нагрузку на двигатель. Обычно рекомендованный размер будет указан в спецификации.
Питание

Тоже можно подсмотреть в спецификации. Обычная банка имеет номинальное напряжение 3.7в. При последовательном соединении суммируется напряжение, а при параллельном – ёмкость (она же время полёта). Это значит, что если ты видишь рекомендованный аккумулятор 2-3S Li-po (7,4-11,1V), то тебе потребуется два, или три последовательно соединённых литий-полимерных аккумулятора и соответствующая плата питания. В этом диапазоне всё будет работать (конечно, чем меньше- тем слабее). Параллельно можно суммировать только одинаковые блоки, но зато сколько душе угодно.
Маркировка двигателей для квадрокоптеров
На самом деле стандарта нет. Каждый лепит на свою продукцию что захочет. К счастью, есть общепринятые нормы, которые соблюдает большинство.
Первая буква отражает качество изготовления.
- «V» серия специально для ответственных мультикоптеров, изготовлена из лучших материалов при высочайшей точности сборки. Обычно, это гоночные электродвигатели, которые вращаются намного быстрее обычных
- «X» серия для моделей самолётов и мультикоптеров – середнячков. Хороший КПД, качество и сборка по терпимой цене
- «A» серия – Бюджетное решение, которое будет чуть хуже, чем предыдущие, но всё так же будет хорошо работать. Не стоит её пугаться
Первые четыре цифры, это параметры магнитопровода. Первые две –диаметр, вторые две –толщина набора. Они, на самом деле тебе не очень нужны. Не заморачивайся. Их тебе нужно знать в основном для того, чтобы понимать следующий параметр.
Спонтанный ликбез: Магнитопровод, это та часть двигателя или трансформатора, на которую намотана обмотка. Он набирается из пластин.
Количество витков
От количества витков зависит толщина провода, при равных параметрах магнитопровода. На один и тот же магнитопровод можно намотать 13 или 15 витков (к примеру). Чем больше витков, тем меньше диаметр сечения провода и выше внутреннее сопротивление. Отсюда, при равном питающем напряжении, при большем количестве витков, ток и обороты будут ниже. Это подтверждается параметром KV. Для бесщёточного двигателя с 15 витками оно будет ниже, чем у того же мотора, но с 13 витками.

Последняя буква – вид трёхфазного подключения – звезда или треугольник (Y/* или T/Δ соответственно). Снова не буду грузить электроникой, да и в случае с квадрокоптерами подключение не так важно.
- Мотор подключенный через звезду будет более мягко и плавно разгоняться, но не сможет развить максимальную заявленную мощность
- Подключение через треугольник даст более резкий набор скорости и полную заявленную мощность, но потребует намного больший пусковой ток
Возьмём для разбора такую маркировку A2212/15T.
22 – магнитопровод диаметром 22мм
12 — толщина набора 12мм
15 – 15 витков
А – Ширпотреб для бюджетных аппаратов
Т – (иногда заменяют на Δ) намотка типа дельта (треугольником)
Особенности моторов
CW и CCW

Это направления вращения, на которые рассчитан мотор. CW – по часовой стрелке, CCW – против. На самом деле направление вращения всегда можно изменить без потерь. Этот параметр скорее относится к креплению. При вращении в неправильную сторону мотор может разбалтываться, из-за особенностей крепления, или, если пропеллер фиксируется на резьбовом соединении, он будет откручиваться.
Тип магнитов
Мощность двигателей, и их кпд во многом зависят от силы постоянных магнитов ротора. Можно брать исключительно неодимовые магниты. Это, в основном, касается покупок из Китая, где могут подсунуть с виду работающий, но слабенький агрегат.
Кстати, важно, что неодим является крайне хрупким материалом, который плохо переживает удары. Ронять его не стоит, ибо могут появиться микротрещины, которые приведут к потере мощности.
Полый вал
Особым понтом считается полый вал двигателя. Если есть возможность, то стоит брать именно такой. Он совершенно не уступает по прочности цельному валу, так как центральная часть не нагружено, но немного экономит вес.
Шплинты и пружинные стопорные шайбы E clips, C clips
Из-за вибраций, создаваемых моторами и пропеллерами, винтики могут откручиваться или ослабевать. Это серьёзная проблема, ибо конструкция всегда должна быть жёсткой. Решается проблема использованием шплинтов или стопорных шайб.
Шплинт – вариант не самый лучший. Только для того, чтобы что-нибудь не отвалилось. Винтики им укрепить не получится.
Пружинная шайба – По сути, это небольшая пружинка, которая распирает болт в резьбе, тем самым делает его выкручивание проблематичным. Это отличный вариант для крепления любых узлов к раме, однако использовать его имеет смысл только если под шайбой имеется твёрдая поверхность (мягкий пластик не в счёт)
Итог
Дроны беспилотники, это достаточно сложный и точный механизм, который требует тщательного подхода к выбору комплектующих. Надеюсь, после прочтения этой статьи тебе стало понятно чуть больше о движущей силе твоего летательного аппарата.
И как всегда, банальное, но очень важное напутствие – думай, прежде чем делать. Даже куча потраченных денег на самое лучшее оборудование не гарантирует то, что оно будет работать хорошо. Отталкивайся от того, что нужно именно тебе. Читай, узнавай, анализируй.
Сегодня в данной статье Вы узнаете фундаментальные знания о вращательных винтах для квадрокоптера (которые к тому же называют реквизитами). Какие показатели влияют на их производительность и эффективность. Какие формы и сколько лопастей должны быть у пропеллера, чтобы не занижаться тягу.
Что нужно знать: основные определения и понятия
Пропеллеры для квадрокоптеров подразделяются по следующим критериям:
- какая у них длина;
- какой у них шаг;
- какая площадь пропеллеров;
- какое направление вращения;
- какая у них форма;
- и сколько лопастей на каждом пропеллере;
Длина пропеллера и его шаг
Длина и шаг являются главными параметрами определяющие тягу. Во время вращения винта, лопасти образуют диск. Диаметр этого диска и есть длина. Под шагом понимают расстояние, которое винт может преодолеть за одно вращение, в некой плотной среде (если вспомнить шуруп, и то как он вкручивается в доску, то все становится понятно). Величина шага у лопастей квадрокоптера, зависит от наклона самих лопастей, то под каким углом они расположены (угол атаки).
Тяга считается сильной, когда винтомоторная группа (ВМГ) винтами перемещает большой объём воздуха. При увеличении длины, шага или какого-то одного из этих параметров, где скорость вращения остается неизменной, тяга винтов увеличивается. Вместе с этим образуется турбулентность за счет увеличения сопротивления воздуха. И как следствие, большой радиус пропеллера и угол наклона лопастей, потребует больших затрат энергии, за счет чего будет уменьшено время полёта.
Для аэрофотосъёмки идеально подойдут большие пропеллеры с малым шагом, а небольшие винты с большим шагом подойдут для гоночных дронов, которым важна скорость полёта.
Количество и форма лопастей пропеллеров
Стандартным вариантом принято считать пропеллер с двумя лопастями. На большинство маленьких квадрокоптерах ставятся винты с лопастями больше двух. Это позволяет обеспечить более равномерный поток распределения воздуха, и как следствие снизить уровень турбулентности. К тому же, за счет дополнительных лопастей увеличивается и подъемная сила. Таким образом, маленький диаметр винта с тремя (или более) лопастями, способен обеспечить силу подъёма, что и стандартный пропеллер с двумя лопастями и большим диаметром. Отзывчивость квадрокоптера, также зависит от количества лопастей у пропеллера, и чем больше их, тем отзывчивее дрон в полёте. Стоимость таких многолопастных винтов дороже стандартных, и есть сложности в изготовлении и отцентровки данных винтов. Такие винты следует покупать у производителей или официальных дилеров.
Присмотритесь на различия форм окончаний лопастей. Их подразделяют на три категории:
- Normal;
- Bullnose (BN);
- Hybrid Bullnose (HBN);
Винты Normal позволяют сэкономить расход аккумулятора за счет меньшей тяги, и благоприятно влияют на продолжительность полёта не вызывая дополнительного перерасхода энергии. На винтах Normal имеются заостренные наконечники. Равный диаметр винтов BN при их большой площади создает большую тягу. Такое преимущество сопровождается недостатком – уменьшение времени полёта из-за высокого потребления энергии. Имеющиеся утяжелители на кончиках реквизитов, способствуют увеличению крутящего момента и повышают скорость реакции квадрокоптера по оси рысканья. Что касается наконечников HBN, то они находятся между Normal и Bullnose.
Направление вращения
За направление вращение лопастей отвечают двигатели, которые разделяют на два типа:
- CW – крутит пропеллер по часовой стрелке;
- CCW – крутит пропеллер против часовой стрелки;
Принцип установки таких моторов зависит от схемы устройства квадрокоптера. Более наглядно схемы изображены на рисунке.

По кромке лопасти можно определить то, в какую сторону он вращается.

Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
- прочность;
- эффективность;
- лёгкость;
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.

Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов – это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Спецификация и характеристики
Чтобы понять параметры определенного пропеллера, следует смотреть на кодировку. Производители обозначают длину, шаг и количество лопастей в таком формате:
LLPPxB или LxPxB – где L-длина лопасти, P-шаг (указывается в дюймах) и B-количество лопастей.
На примере разберем два разных формата обозначения:
Так первый реквизит с пометкой 6045 (6 на 4,5), говорит о том, что у пропеллера две лопасти (по стандарту), 6-дюймов длина и 4,5-дюйма шаг.
Во втором уже указано количество лопастей 5040 на 3 (5 на 4 и 3), где 3 на конце это, как раз, количество лопастей. А 5 и 4 дюйма, длина и шаг соответственно.
В некоторых случаях указываются обозначения направления вращения. Они указываются латинскими буквами – R и C. Так пропеллеры с пометкой (C) ставятся на двигатели CCW, а с пометкой (R) – на двигатели с CW. Еще некоторые производители указывают аббревиатуры из чего они изготовлены BN, что значит с заостренными наконечниками и утяжелителями или HBN – гибрид пластика и карбона (о них мы говорили выше).
Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора - это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы – это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.

Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком – гайкой, особой формы.

На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется “эффект желе” при съёмках видео. Помимо качества записи видео, также страдают и двигатели. Постоянные вибрации оказывают негативное влияние на двигатели, подшипники и шерстни, тем самым увеличивая стоимость обслуживания квадрокоптера.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается – Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.

Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой). На более легкую лопасть можно наклеить скотчи или нанести на нее лак для ногтей, если таковой имеется под рукой. В случае если нет ни того ни другого, используйте суперклей.
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение – переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Калькулятор eCalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис – eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.

Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит “без привода”), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе +10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены – одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете – температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров – тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
RashVinta – программа, которая производит расчет параметров воздушного винта не только для квадрокоптера, но и других летательных аппаратов.
С помощью RashVinta можно делать вычисления с исходными данными, такие как:
Мощность двигателя и диаметр винта;
Мощность двигателя и частота вращения винта;
Диаметр Винта и его шаг.

В первом случае устанавливаем флажок только на параметре “расчет по диаметру винта”. Указываем информацию о размере пропеллера, мощность двигателя, скорость полета – максимальная и средняя. Жмем “Рассчитать” и видим параметры шага и частоту обращения пропеллера.
Во втором случае все отметки снимаются. Далее, как и в первом случае указываем исходную мощность двигателя, также не забываем про частоту вращения винта и скорость летательного аппарата, аналогично первому случаю. Жмем “Рассчитать” и видим все нужные данные по диаметру винта и его шагу.
В третьем случае расчеты производятся на профессиональном уровне. Галочкой отмечаем пункт “указать параметры винта”. Параметры диаметра и шага винта вносим в нужные поля. Жмем “Рассчитать” и видим данные по профилю лопасти винта, его изображение появляется в окне. Можно менять масштаб для его изучения. Все заключения по расчетам сохраняются в виде таблиц в формате date.html, предусмотренном в сборке программы.
В программе есть возможность увидеть профиль лопасти под углом наклона. Для этого отметьте галочкой пункт “Профиль с углом”. И еще можно увидеть точки, который были использованы для расчета – отметьте галочкой пункт “показать расчетные точки”. На принтере данное изображение профиля можно вывести на бумагу в проекции 1:1.
Заключение о сложности процедуры
Как вы уже заметили, работы по подбору и корректировке реквизитов, довольно сложная задача для новичка. Но я надеюсь, что эта статья будет полезна для любителей квадрокоптеров и другой беспилотной авиации, грамотно провести процедуру балансировки пропеллеров, их установки на квадрокоптер с самодельной конструкцией. А также избавиться от ошибок в работе ВМГ серийных моделей мультикоптеров.
Update: В связи с большим интересом именно к этой части, статья от двигателях расширена и дополнена информацией о таких параметрах двигателя как KV и размеры XXYY.
И так, двигатель, или по-другому — мотор.
Как видно из картинки ниже, двигатели могут быть самых разных размеров и иметь разный внешний вид и цвет. Хотя есть и общая черта, которая их объединяет — цилиндрическая форма.
Когда мы говорим о двигателях для летающих моделей, мы, как правило, имеем в виду бесколлекторные (бесщёточные) моторы. Эти моторы очень похожи на обычные. У них тоже есть магниты и обмотки, но нет щеток, для передачи тока к от контактов двигателя к обмоткам. Именно поэтому, они и называются бесщеточными (brushless). Можно считать эти моторы трехфазными. Напряжение подается на обмотки не непрерывно, как у обычных моторов для постоянного тока, а с определенной частотой. Это и заставляет движущуюся часть мотора вращаться. При чем, такие моторы могут вращаться намного быстрее обычных, и при этом еще и не терять энергию на щетках.
Какие характеристики важны при выборе двигателя? По мимо размера, формы, цвета и т.д. следует обратить внимание на две важнейшие характеристики бесколлекторных моторов:
- потребляемый ток (измеряется в амперах А)
- Kv-rating
C первой характеристикой должно быть понятно. Чем выше мощность мотора, тем выше потребляемый ток, при одинаковом напряжении питания. Чем больше ток, тем больше подъемную силу создает двигатель. Ток зависит от оборотов двигателя и нагрузки на него, создаваемой пропеллером.
Kv-rating показывает сколько оборотов своей оси будет совершать двигатель за одну минуту (RPM) при определенном напряжении. Формула вот такая: RPM=Kv*U
Как использовать эти параметры при выборе двигателя? Во-первых, максимальный потребляемый ток говорит нам о том, какой контроллер скорости выбрать (об этом позже). Kv-rating — это аналог лошадиных сил в автомобиле. Мало кто понимает что это такое, но все знают, что 100 лс — это мало, а 600 — это круто. Вот так и тут 🙂
Остановимся подробнее на этом параметре — KV. Сравнение с лошадиными силами хоть и правильное, но не совсем понятное при выборе двигателя под вашу модель. Представьте спортивную машину мощностью 600 лс. Сможет ли она поехать 300 км/час? Думаю да. А сможет ли она сделать тоже самое, если к ней привязать 1т груза? Нет. И даже не сдвинется с места. Не потому, что мощности мало, а потому, что колеса будут пробуксовывать. Что нам нужно для перетягивания 1т груза? Трактор. У трактора может быть меньшая мощность, и маленькая скорость, но большие колеса и крутящий момент позволят потянуть наш груз. И так, мы видим, что одна и та же энергия нужна и для быстрого вращения маленьких колес, и для медленного вращения больших колес. В случае с квадрокоптерами, двигатель с большим KV идеально подходит для маленьких быстро вращающихся пропеллеров (гоночные квадрокоптеры), а двигатели с маленьким KV — для больших дронов с большими пропеллерами.
Типичный двигатель гоночного квадрокоптера имеет KV 2100-2500, тогда как для тяжелых аппаратов, способных поднять несколько килограмм своего веса и столько же груза — 200-900 KV. У гоночных моделей пропеллеры обычно 5-6 дюймов, у больших аппаратов, предназначенных для длительных полетов и фотосъемки — 15-17 дюймов. Представляете, какие нагрузки будут на двигатель, пропеллер и все остальное, если пропеллер размером 15 дюймов раскрутить до нормальных оборотов маленького пропеллера? KV рейтинг двигателя очень важная характеристика при выборе, хотя это и не единственный важный параметр.
Важным параметром при выборе мотора для конкретного аппарата является его подъемная сила (Trust). Измерить подъемную силу можно в разных единицах, хотя правильной является Ньютон, но удобной Килограмм. И так, подъемная сила в 500 грамм означает, что 4 двигателя способны будут поднять 2 кг веса, включая самих себя. При этом, нужен запас мощности. Итого, имеем формулу Сила/1 Мотор = (Вес Коптера x 2) / 4. Для коптера весом 1 кг нужны двигатели с минимум 500 грамм подъемной силы. Все просто.
Еще одной характеристикой двигателя является его эффективность. Не будем останавливаться подробно, но отметим, что двигатель с эффективностью 70% тратит 70% энергии на полет, и 30% на обогрев вселенной, как говорил мой учитель физики. Эффективность двигателя зависит не только от самого устройства, а еще и от других элементов: пропеллера, батареи, контроллера скорости, веса и т.д.
Кроме всего этого, двигатели еще имеют физические параметры, которые отображаются в их размерах. Это высота двигателя, диаметр и количество катушек обмотки. Например, Turnigy Multistar 5130-350 — это двигатель с диаметром статора 51 мм, высотой 30мм и KV 350. Это большой двигатель для больших моделей. А вот этот — Scorpion M-2205-2350KV небольшой, но очень хороший двигатель для гоночных квадрокоптеров. Он 22 мм в диаметре и 5 мм в высоту. Имеет KV рейтинг 2350.
Сам по себе двигатель не может создавать подъемную силу — нужен пропеллер. Пропеллер — это своего рода преобразователь энергии вращения вала двигателя в подъемную силу.

Важнейшими характеристиками пропеллера являются его размер и угол наклона лопастей (Pitch). Размер обычно указывается в дюймах, и тут все понятно. Pitch тоже указывается в дюймах, и означает, на сколько поднялся бы пропеллер за один оборот вокруг своей оси с данным наклоном лопасти, если бы он двигался в плотном веществе.
Меньший пропеллер с меньшим наклоном лопастей меньше сопротивляется воздуху, и соответственно, меньше нагружает двигатель, не давая ему использовать всю свою мощность. Соответственно, очень большой пропеллер будет сильнее нагружать двигатель и приведет к его перегрузке. Таким образом, надо подбирать пропеллеры так, чтобы попадать в допустимые границы рабочих параметров двигателя и создавать достаточную подъемную силу. Стандартным пропеллером для среднего квадрокоптера обычно является пропеллер с характеристиками 8-11/4.5-4.7 Рассчитать параметры пропеллера (и не только) поможет, например, вот этот сайт .
Кроме того, не забудьте, что пропеллеры бывают двух типов вращения: по часовой стрелке и против. Необходимо это для того, что половина двигателей квадрокоптера вращается в одну сторону, а другая половина — в обратную.
Скоро мы рассмотрим несколько двигателей, с точки зрения влияния их характеристик на параметры квадрокоптера и научимся выбирать двигатель под наши задачи.
Очень хорошая статья о выборе двигателя и пропеллеров на английском языке вот .